
Research Areas
- Virtual Robotics
- Embodied Cognition
- Cognitive Robotics
- Computational Psychology
- Extended Cognition
Overview
The Vehicles project is based on the work of the Italian neuroscientist and cyberneticist, Valentino Braitenberg. Through a series of the elegant thought experiments, published in his 1984 book, Vehicles: Experiments in Synthetic Psychology, Braitenberg suggested that surprisingly complex behaviour could emerge from the interaction between forces and factors that were distributed across brain, body and world. In particular, once we factor in the contributions of the physical environment and bodily structure, the kind of behavioural control mechanisms required to yield intelligent behaviour may, Braitenberg suggested, be quite simple. Vehicles is an attempt to extend Braitenberg’s original work using state-of-the-art approaches to the creation of virtual robotic platforms and interactive 3D environments.
Aims
The Vehicles project aims to advance our understanding of the interplay between physical forces, bodily structure and simple perceptuo-motor control mechanisms in the realization of behaviour that looks intelligent, or that warrants the ascription of intentional mental states. By using a virtual environment, it is possible to flexibly reconfigure all the forces and factors that conspire to create complex behaviour.
Approach
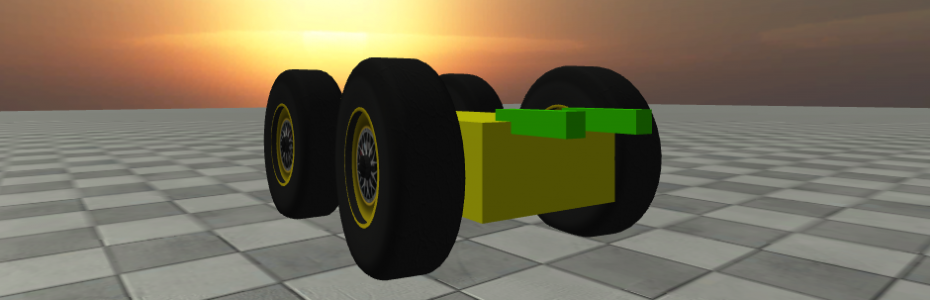
![]() Vehicles uses the Unity game engine to construct a series of simple four-wheeled vehicles that are embedded in a virtual 3D environment. The behaviour of each vehicle is controlled by a library of custom Unity components that act as the vehicle’s nervous system. Vehicles can perceive their environment using visual, olfactory and tactile information. Visual information is provided by camera components that function as the vehicle’s eyes. They render the current scene (from the vehicle’s perspective) to a 2D texture asset that is then subjected to image processing. Tactile information is provided by sensors attached to hinge joints or C# routines that rely on RayCasting techniques. Motor output takes the form of physical forces that are applied to Wheel Collider components. These change the angular orientation and rotation of the vehicle’s wheels and control the vehicle’s movement in the 3D landscape.
Vehicles uses the Unity game engine to construct a series of simple four-wheeled vehicles that are embedded in a virtual 3D environment. The behaviour of each vehicle is controlled by a library of custom Unity components that act as the vehicle’s nervous system. Vehicles can perceive their environment using visual, olfactory and tactile information. Visual information is provided by camera components that function as the vehicle’s eyes. They render the current scene (from the vehicle’s perspective) to a 2D texture asset that is then subjected to image processing. Tactile information is provided by sensors attached to hinge joints or C# routines that rely on RayCasting techniques. Motor output takes the form of physical forces that are applied to Wheel Collider components. These change the angular orientation and rotation of the vehicle’s wheels and control the vehicle’s movement in the 3D landscape.
Why Virtual Robots?
- Expertise: The development of a real robot requires considerable engineering expertise, not just with respect to the construction of the electrical circuitry but also with respect to the physical construction of the robot’s body. The construction of virtual robots does require considerable programming expertise; however, the availability of sophisticated editors and scripting languages, such as those provided by the Unity platform, simplifies the process of robot design and implementation.
- Configuration: One of the main advantages of virtual robots is that they can be easily configured and reconfigured to suit the demands of particular experiments. In contrast to physical robots, all aspects of the robot’s body (e.g., sensor placement), control system (e.g., sensor processing routines) and even their physical environment (e.g., lighting and gravity) can be easily adjusted to test their effects on behavioural output.
- Sharing: Virtual robotic models can be shared with a global community via the Internet. This enables existing designs and experiments to be easily extended by a community of researchers and developers.
Project Outputs
-
- Coming soon.
-
- Braitenberg, V. (1984) Vehicles: Experiments in Synthetic Psychology. MIT Press, Cambridge, Massachusetts, USA.
- Unity – Game Engine
- Lloyd, D. (1989) Simple Minds. MIT Press, Cambridge, Massachusetts, USA.